ACP Lab
ACP Lab
News
People
Publications
Gallery
Student Projects
Contact
Journals
VBT-MPC: Vision-Based Tactile MPC for Contour Following
IEEE Robotics and Automation Letters (RA-L)
, 2026
Edison P. Velasco-Sanchez
,
Luis F. Recalde
,
Guanrui Li
,
Pablo Gil
PDF
Cite
Code
Project
Video
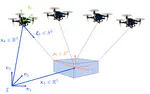
ES-HPC-MPC: Exponentially Stable Hybrid Perception Constrained MPC for Quadrotor with Suspended Payloads
IEEE Robotics and Automation Letters (RA-L)
, 2025
Luis F. Recalde
,
Mrunal Sarvaiya
,
Giuseppe Loianno
,
Guanrui Li
PDF
Cite
Project
Video
PolyFly: Polytopic Optimal Planning for Collision-Free Cable-Suspended Aerial Payload Transportation
IEEE Robotics and Automation Letters
Mrunal Sarvaiya
,
Guanrui Li
,
Giuseppe Loianno
Oct 17, 2025
PDF
Cite
Project
Video
Source Document
DQ-NMPC: Dual-Quaternion NMPC for Quadrotor Flight
IEEE Robotics and Automation Letters (RA-L)
, 2025
Luis F. Recalde
,
Dhruv Agrawal
,
Jon Arrizabalaga
,
Guanrui Li
PDF
Cite
Code
Project
Video
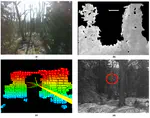
DualQuat-LOAM LiDAR Odometry and Mapping parametrized on Dual Quaternions
Robotics and Autonomous Systems
, 2025
Edison P. Velasco-Sanchez
,
Luis F. Recalde
,
Guanrui Li
,
Francisco A. Candelas-Herias
,
Santiago T. Puente-Mendez
,
Fernando Torres-Medina
PDF
Cite
Code
Project
Video
Human-Aware Physical Human-Robot Collaborative Transportation and Manipulation with Multiple Aerial Robots
IEEE Transactions on Robotics (T-RO)
, 2025
Guanrui Li
,
Xinyang Liu
,
Giuseppe Loianno
PDF
Cite
Video
HPA-MPC: Hybrid Perception-Aware Nonlinear Model Predictive Control for Quadrotors with Suspended Loads
IEEE Robotics and Automation Letters (RA-L)
, 2024
Mrunal Sarvaiya
,
Guanrui Li
,
Giuseppe Loianno
PDF
Cite
Project
Video
RotorTM: A Flexible Simulator for Aerial Transportation and Manipulation
IEEE Transactions on Robotics (T-RO)
, 2024
Guanrui Li
,
Xinyang Liu
,
Giuseppe Loianno
PDF
Cite
Code
Video
Physics-Inspired Temporal Learning of Quadrotor Dynamics for Accurate Model Predictive Trajectory Tracking
IEEE Robotics and Automation Letters (RA-L)
, 2022
Alessandro Saviolo
,
Guanrui Li
,
Giuseppe Loianno
PDF
Cite
Video
Cooperative Transportation of Cable Suspended Payloads With MAVs Using Monocular Vision and Inertial Sensing
IEEE Robotics and Automation Letters (RA-L)
, 2021
Guanrui Li
,
Rundong Ge
,
Giuseppe Loianno
PDF
Cite
Video
Conferences
Trajectory Planning Using Safe Ellipsoidal Corridors as Projections of Orthogonal Trust Regions
International Conference on Robotics and Automation (ICRA)
, 2026
Akshay Jaitly
,
Jon Arrizabalaga
,
Guanrui Li
PDF
Cite
Enhancing Human-Drone Spatial Awareness with a Mixed Reality Interface for Drone Assisted Interactive Navigation
International Conference on Unmanned Aircraft Systems (ICUAS)
, 2025
Sanket A. Salunkhe
,
Pranav Nedunghat
,
Luca Morando
,
Guanrui Li
,
Giuseppe Loianno
Decentralized Nonlinear Model Predictive Control for Safe Collision Avoidance in Quadrotor Teams with Limited Detection Range
International Conference on Robotics and Automation (ICRA)
, 2025
Manohari Goarin
,
Guanrui Li
,
Alessandro Saviolo
,
Giuseppe Loianno
PDF
Cite
Video
Optimal Trajectory Planning for Cooperative Manipulation with Multiple Quadrotors Using Control Barrier Functions
IEEE International Conference on Robotics and Automation (ICRA)
, 2025
Arpan Pallar
,
Guanrui Li
,
Mrunal Sarvaiya
,
Giuseppe Loianno
Experimental System Design of an Active Fault-Tolerant Quadrotor
International Conference on Unmanned Aircraft Systems (ICUAS)
, 2024
Jennifer Yeom
,
Roshan Balu T M B
,
Guanrui Li
,
Giuseppe Loianno
PDF
Cite
Geometric Fault-Tolerant Control of Quadrotors in Case of Rotor Failures: An Attitude Based Comparative Study
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
, 2023
Jennifer Yeom
,
Guanrui Li
,
Giuseppe Loianno
PDF
Cite
Video
Nonlinear Model Predictive Control for Cooperative Transportation and Manipulation of Cable Suspended Payloads with Multiple Quadrotors
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
, 2023
Guanrui Li
,
Giuseppe Loianno
PDF
Cite
Video
Learning Model Predictive Control for Quadrotors
IEEE International Conference on Robotics and Automation (ICRA)
, 2022,
Outstanding Deployed Systems Paper Award Finalist
Guanrui Li*
,
Alex Tunchez*
,
Giuseppe Loianno
PDF
Cite
Video
Vision-based Relative Detection and Tracking for Teams of Micro Aerial Vehicles
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
,2022
Rundong Ge
,
Moonyoung Lee
,
Vivek Radhakrishnan
,
Yang Zhou
,
Guanrui Li
,
Giuseppe Loianno
PDF
Cite
Video
Aggressive Visual Perching with Quadrotors on Inclined Surfaces
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
, 2021
Jeffrey Mao
,
Guanrui Li
,
Stephen Nogar
,
Christopher Kroninger
,
Giuseppe Loianno
PDF
Cite
Video
Design and Experimental Evaluation of Distributed Cooperative Transportation of Cable Suspended Payloads with Micro Aerial Vehicles
The 17th International Symposium on Experimental Robotics (ISER)
, 2021
Guanrui Li
,
Giuseppe Loianno
PDF
Cite
Video
PCMPC: Perception-Constrained Model Predictive Control for Quadrotors with Suspended Loads using a Single Camera and IMU
IEEE International Conference on Robotics and Automation (ICRA)
, 2021
Guanrui Li
,
Alex Tunchez
,
Giuseppe Loianno
PDF
Cite
Video
Efficient Trajectory Library Filtering for Quadrotor Flight in Unknown Environments
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
, 2020
Vaibhav K Viswanathan
,
Eric Dexheimer
,
Guanrui Li
,
Giuseppe Loianno
,
Michael Kaess
,
Sebastian Scherer
PDF
Cite
Video
ModQuad-DoF: A Novel Yaw Actuation for Modular Quadrotors
International Conference on Robotics and Automation (ICRA)
, 2020
Bruno Gabrich
,
Guanrui Li
,
Mark Yim
PDF
Cite
Video
Observability-Aware Trajectories for Geometric and Inertial Self-Calibration
Robotics: Science and Systems: Power On And Go Robots Workshop
, 2020
Christoph Bohm
,
Guanrui Li
,
Giuseppe Loianno
,
Stephan Weiss
PDF
Cite
ModQuad-Vi: A vision-based self-assembling modular quadrotor
International Conference on Robotics and Automation (ICRA)
, 2019
Guanrui Li
,
Bruno Gabrich
,
David Saldana
,
Jnaneshwar Das
,
Vijay Kumar
,
Mark Yim
PDF
Cite
Video
ModQuad: The flying modular structure that self-assembles in midair
IEEE International Conference on Robotics and Automation (ICRA)
, 2018
David Saldana
,
Bruno Gabrich
,
Guanrui Li
,
Mark Yim
,
Vijay Kumar
PDF
Cite
Video
Cite
×