Student Projects

Safety-Critical Control of Quadrotors with High-Order Control Barrier Functions
Modern autonomous drones must operate safely in complex and cluttered environments. While many existing collision avoidance methods assume that thrust commands can be executed instantaneously, real quadrotors are subject to actuator dynamics that introduce delays between the commanded and actual motor responses. Ignoring these dynamics can degrade safety and performance during aggressive maneuvers.
Learning agile flights in clustered environments for quadrotors from pixel information using differentiable simulators and novel sensors
This project focuses on enabling high-speed, agile autonomous aerial robot navigation in visually degraded and environmentally challenging conditions. These include scenarios such as post-earthquake zones, underground exploration, anti-poaching missions, and night-time search and rescue operations where conventional sensors like LiDARs and cameras fail. To address these challenges, the project introduces a novel visuo-sonic sensing suite that combines low-power event cameras and ultrasound sensors, which excel in conditions like darkness, fog, smoke, and transparent environments. Leveraging differentiable physics-based learning, the system adapts control policies in real-time to unconventional sensor inputs, ensuring reliable operation in harsh and dynamically changing environments.
Enhancing Disturbance Rejection in Multi-Aerial Robot Systems with Cable-Suspended Loads
The use of a cable force allocation matrix has proven beneficial for human-payload interaction and for maintaining safe robot separation, without compromising payload trajectory tracking. However, there is a lack of studies on the differential cable force allocation matrix, which could further maximize dynamic manipulability and increase disturbance rejection.
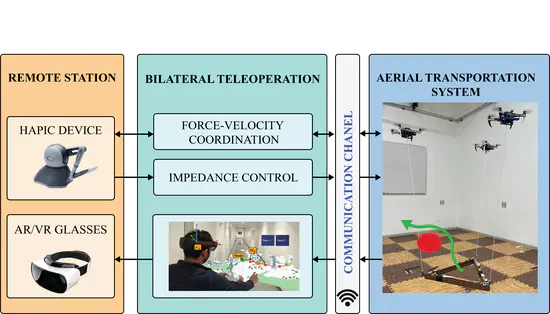
Geometric Impedance Manipulation in Multi-Aerial Robot Systems with Cable-Suspended Loads
This research explores advanced control strategies for human-robot interactions, focusing on a geometric impedance controller on the SE(3) manifold to address the coupling of translational and rotational dynamics in complex motions.