1 paper accepted by RA-L!
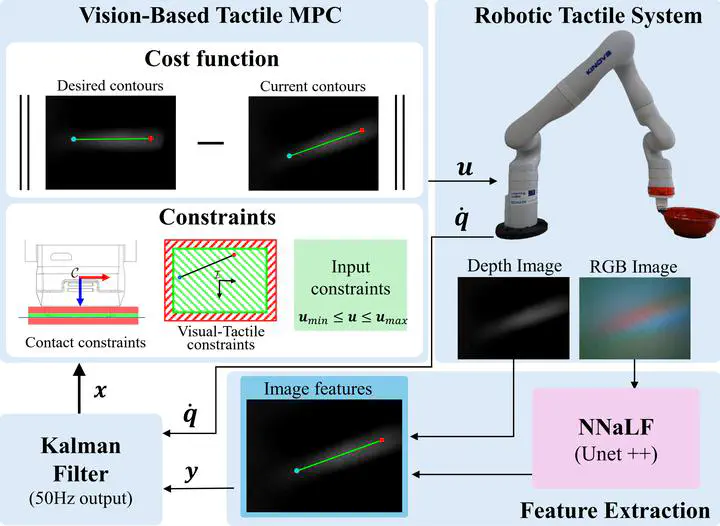
Our work on Vision-Based Tactile Model Predictive Control for robotic contour following has been accepted by by RA-L!!
Our work on Vision-Based Tactile Model Predictive Control for robotic contour following has been accepted by by RA-L!!