1 paper accepted by ICRA!
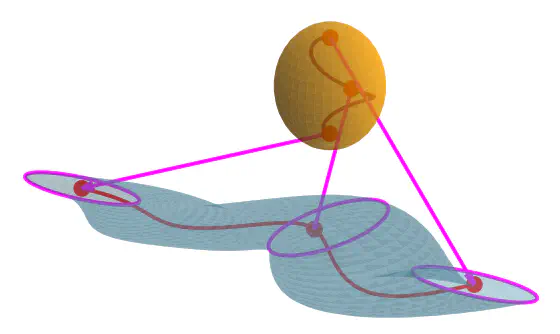
Our work on Trajectory Planning Using Safe Ellipsoidal Corridors as Projections of Orthogonal Trust Regions has been accepted by ICRA!
Our work on Trajectory Planning Using Safe Ellipsoidal Corridors as Projections of Orthogonal Trust Regions has been accepted by ICRA!