Two papers are accepted by ICRA 2025!
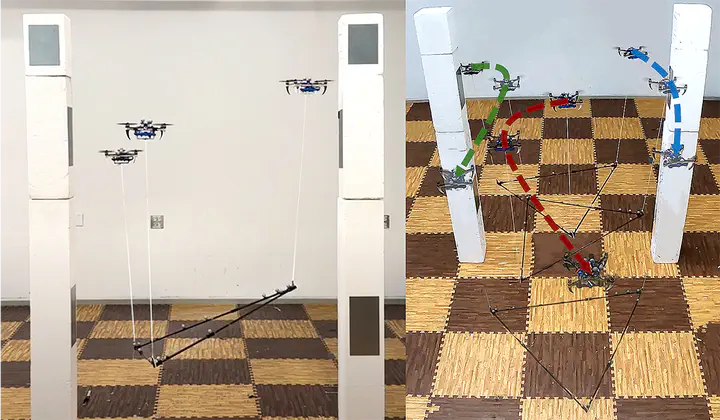
Our conference papers on optimal trajectory planning for cooperative manipulation with quadrotor teams and decentralized MPC for obstacle avoidance of quadrotor team have been accepted to ICRA 2025!
Our conference papers on optimal trajectory planning for cooperative manipulation with quadrotor teams and decentralized MPC for obstacle avoidance of quadrotor team have been accepted to ICRA 2025!