1 journal paper accepted by Robotics and Autonomous Systems!
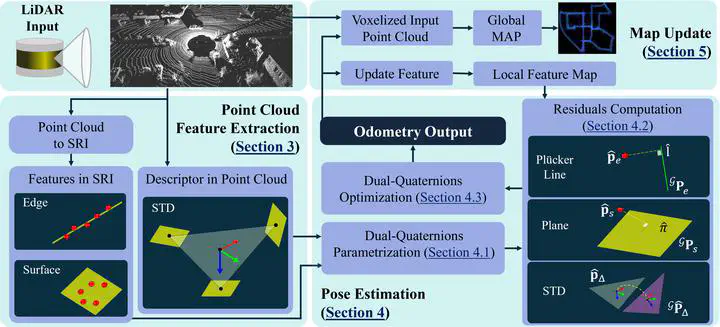
Our work on dual quaternion Lidar odometry and mapping has been accepted by Robotics and Autonomous Systems!
Our work on dual quaternion Lidar odometry and mapping has been accepted by Robotics and Autonomous Systems!