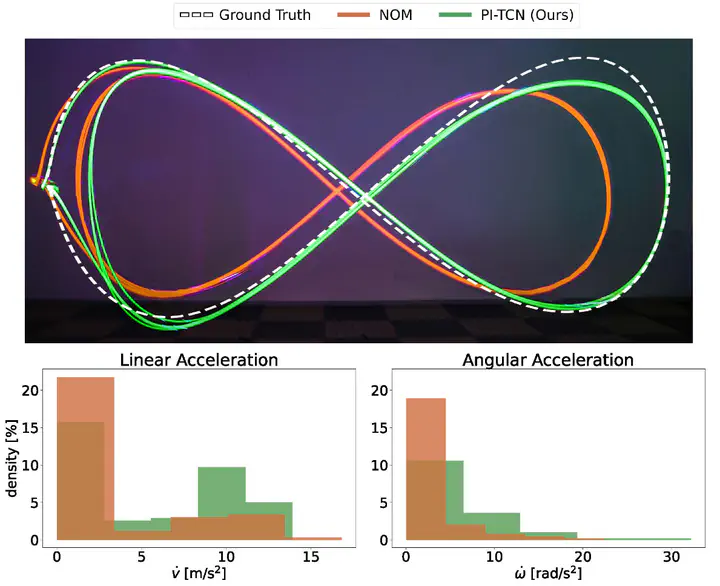
Physics-Inspired Temporal Learning of Quadrotor Dynamics for Accurate Model Predictive Trajectory TrackingAlessandro Saviolo, Guanrui Li, Giuseppe LoiannoPDF Cite Video