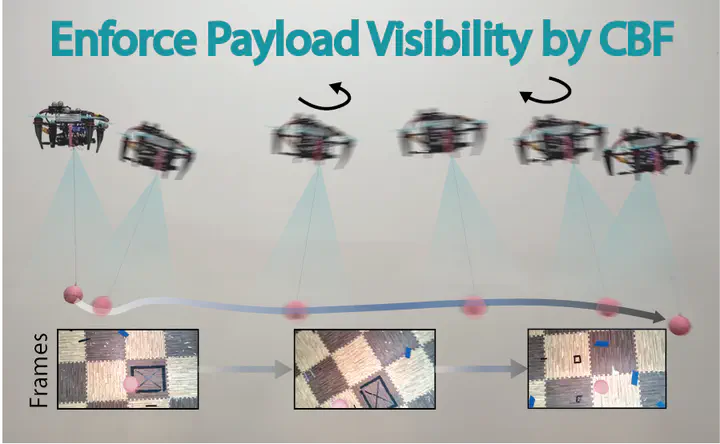
ES-HPC-MPC: Exponentially Stable Hybrid Perception Constrained MPC for Quadrotor with Suspended PayloadsLuis F. Recalde, Mrunal Sarvaiya, Giuseppe Loianno, Guanrui LiPDF Cite Project Video