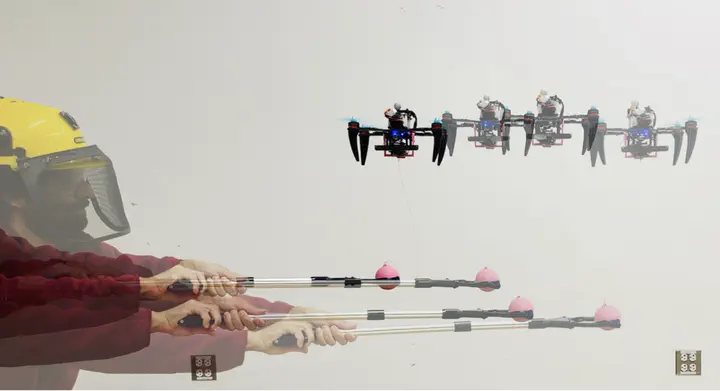
HPA-MPC: Hybrid Perception-Aware Nonlinear Model Predictive Control for Quadrotors with Suspended LoadsMrunal Sarvaiya, Guanrui Li, Giuseppe LoiannoPDF Cite Project Video