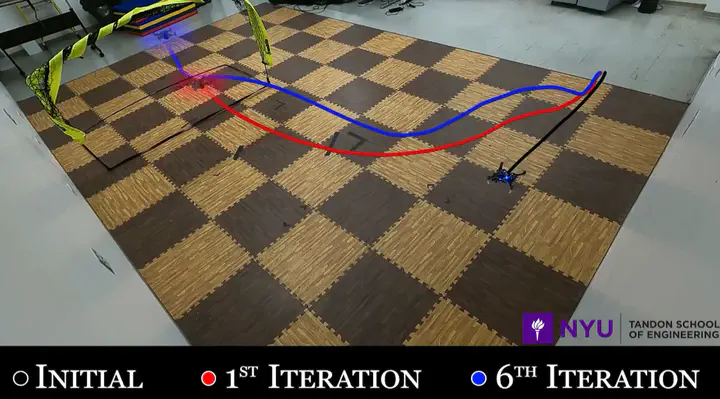
Learning Model Predictive Control for QuadrotorsGuanrui Li*, Alex Tunchez*, Giuseppe LoiannoPDF Cite Video