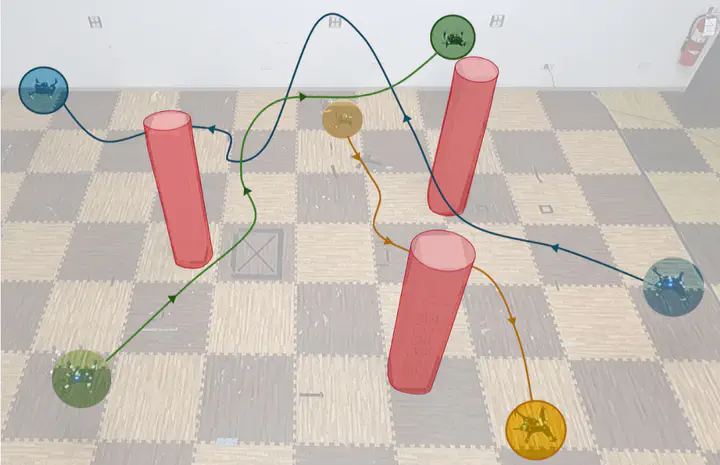
Decentralized Nonlinear Model Predictive Control for Safe Collision Avoidance in Quadrotor Teams with Limited Detection RangeManohari Goarin, Guanrui Li, Alessandro Saviolo, Giuseppe LoiannoPDF Cite Video